
DS004841: eeg dataset, 20 subjects#
TX14
Access recordings and metadata through EEGDash.
Citation: Gabriella Larkin, James A. Davis, Victor Paul, Marcel Cannon, Chris Manteuffel, Ben Brewster, Tony Johnson, Mike Dunkel, Stephen Gordon, Kevin King (—). TX14. 10.18112/openneuro.ds004841.v1.0.1
Modality: eeg Subjects: 20 Recordings: 147 License: CC0 Source: openneuro Citations: 0.0
Metadata: Complete (100%)
20-participant EEG dataset — TX14.
Quickstart#
Install
pip install eegdash
Access the data
from eegdash.dataset import DS004841
dataset = DS004841(cache_dir="./data")
# Get the raw object of the first recording
raw = dataset.datasets[0].raw
print(raw.info)
Filter by subject
dataset = DS004841(cache_dir="./data", subject="01")
Advanced query
dataset = DS004841(
cache_dir="./data",
query={"subject": {"$in": ["01", "02"]}},
)
Iterate recordings
for rec in dataset:
print(rec.subject, rec.raw.info['sfreq'])
If you use this dataset in your research, please cite the original authors.
BibTeX
@dataset{ds004841,
title = {TX14},
author = {Gabriella Larkin and James A. Davis and Victor Paul and Marcel Cannon and Chris Manteuffel and Ben Brewster and Tony Johnson and Mike Dunkel and Stephen Gordon and Kevin King},
doi = {10.18112/openneuro.ds004841.v1.0.1},
url = {https://doi.org/10.18112/openneuro.ds004841.v1.0.1},
}
About This Dataset#
TX14 dataset: Perform a local situational awareness task while maintaining supervisory control of a semi-autonomous vehicle.
This Army’s transition to a leaner, more agile and rapidly-deployable force requires the advent of autonomous technologies and systems, and more reliance on computers and machines. This move from traditional warfare to FCS represents a shift in the human role, as well. Technological advancement has made it so that the role of the user has been transformed from active controller to system monitor and manager, intervening only in the case of a problem. As such, the soldier’s dependency on robotics technologies, tele-operations, indirect driving and autonomy is expected to increase significantly. Additionally, although semi-autonomous driving technologies have proven beneficial in aggregate measures of local area awareness (i.e., target/threat detection) and vehicle control, it is important to understand the situational trade-offs between local area awareness and vehicle control, as situational trade-offs provide the basis for developing dynamic task allocation within Crewstations.
Cohort#
Dataset Statistics#
Channel counts: 70 ch (n=147 recordings)
Sampling frequencies: 256.0 Hz (n=147 recordings)
Total recording duration: 28 h
Signal · Electrodes & live trace#
Live trace viewer — sub-019 · ses-VehicleWithNoise · task-DriveOnMission · run-2
Showing one representative recording out of
20 subjects and 147 recordings in this dataset.
Browse the full set on OpenNeuro;
drop any other _eeg.{set,edf,bdf,vhdr} file onto the
viewer (or pass ?eeg=<url>) to inspect it.
Electrode layout — EEG · 64 sensors — 64 channels
NEMAR Processing Statistics#
The plots below are generated by NEMAR’s automated EEG pipeline. The histogram shows pipeline success for data cleaning and ICA decomposition, the percentage of data frames and EEG channels retained after artefact removal, line noise per channel (RMS, dB), and the age/gender distribution of participants.

HED event descriptors word cloud

Manifest#
File Explorer#
Browse the BIDS file structure of this dataset. Records are fetched on demand from the EEGDash catalog the first time you open the explorer.
Full dataset metadata table
Dataset ID |
|
Title |
TX14 |
Author (year) |
|
Canonical |
— |
Importable as |
|
Year |
— |
Authors |
Gabriella Larkin, James A. Davis, Victor Paul, Marcel Cannon, Chris Manteuffel, Ben Brewster, Tony Johnson, Mike Dunkel, Stephen Gordon, Kevin King |
License |
CC0 |
Citation / DOI |
|
Source links |
OpenNeuro | NeMAR | Source URL |
Copy-paste BibTeX
@dataset{ds004841,
title = {TX14},
author = {Gabriella Larkin and James A. Davis and Victor Paul and Marcel Cannon and Chris Manteuffel and Ben Brewster and Tony Johnson and Mike Dunkel and Stephen Gordon and Kevin King},
doi = {10.18112/openneuro.ds004841.v1.0.1},
url = {https://doi.org/10.18112/openneuro.ds004841.v1.0.1},
}
API Reference#
eegdash.datasetEEGDashDatasetDS004841 · Larkin2023_TX14eegdash/dataset/registry.py · [source ↗]- class eegdash.dataset.DS004841(cache_dir: str, query: dict | None = None, s3_bucket: str | None = None, **kwargs)[source]#
TX14
- Study:
ds004841(OpenNeuro)- Author (year):
Larkin2023_TX14- Canonical:
—
Also importable as:
DS004841,Larkin2023_TX14.Modality:
eeg; Experiment type:Attention; Subject type:Healthy. Subjects: 20; recordings: 147; tasks: 1.- Parameters:
cache_dir (str | Path) – Directory where data are cached locally.
query (dict | None) – Additional MongoDB-style filters to AND with the dataset selection. Must not contain the key
dataset.s3_bucket (str | None) – Base S3 bucket used to locate the data.
**kwargs (dict) – Additional keyword arguments forwarded to
EEGDashDataset.
- data_dir#
Local dataset cache directory (
cache_dir / dataset_id).- Type:
Path
Notes
Each item is a recording; recording-level metadata are available via
dataset.description.querysupports MongoDB-style filters on fields inALLOWED_QUERY_FIELDSand is combined with the dataset filter. Dataset-specific caveats are not provided in the summary metadata.References
OpenNeuro dataset: https://openneuro.org/datasets/ds004841 NeMAR dataset: https://nemar.org/dataexplorer/detail?dataset_id=ds004841 DOI: https://doi.org/10.18112/openneuro.ds004841.v1.0.1 NEMAR citation count: 0
Examples
>>> from eegdash.dataset import DS004841 >>> dataset = DS004841(cache_dir="./data") >>> recording = dataset[0] >>> raw = recording.load()
- __init__(cache_dir: str, query: dict | None = None, s3_bucket: str | None = None, **kwargs)[source]#
- save(path: str, overwrite: bool = False, offset: int = 0)[source]#
Save datasets to files by creating one subdirectory for each dataset:
path/ 0/ 0-raw.fif | 0-epo.fif description.json raw_preproc_kwargs.json (if raws were preprocessed) window_kwargs.json (if this is a windowed dataset) window_preproc_kwargs.json (if windows were preprocessed) target_name.json (if target_name is not None and dataset is raw) 1/ 1-raw.fif | 1-epo.fif description.json raw_preproc_kwargs.json (if raws were preprocessed) window_kwargs.json (if this is a windowed dataset) window_preproc_kwargs.json (if windows were preprocessed) target_name.json (if target_name is not None and dataset is raw)
- Parameters:
path (str) –
- Directory in which subdirectories are created to store
-raw.fif | -epo.fif and .json files to.
overwrite (bool) – Whether to delete old subdirectories that will be saved to in this call.
offset (int) – If provided, the integer is added to the id of the dataset in the concat. This is useful in the setting of very large datasets, where one dataset has to be processed and saved at a time to account for its original position.
BaseDataset from braindecode — windowed via create_windows_from_events.braindecodeDataLoader; supports parallel workers and on-the-fly augmentations.pytorchdatasets.load_dataset("EEGDash/ds004841").huggingface Find datasets with the EEGDash APIQuery the catalogue, filter by task or modality, list candidates.
Find datasets with the EEGDash APIQuery the catalogue, filter by task or modality, list candidates. Load one EEG recordingResolve a single record to an MNE Raw with channels and events.
Load one EEG recordingResolve a single record to an MNE Raw with channels and events. EEG recording to PyTorch DataLoaderWrap braindecode windows in a DataLoader for model training.
EEG recording to PyTorch DataLoaderWrap braindecode windows in a DataLoader for model training. Preprocess EEG and create windowsFilter, resample, epoch — and persist the windowed dataset.
Preprocess EEG and create windowsFilter, resample, epoch — and persist the windowed dataset.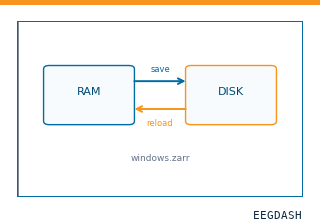 Save and reload prepared dataCache a windowed dataset to disk and reattach it without recompute.
Save and reload prepared dataCache a windowed dataset to disk and reattach it without recompute.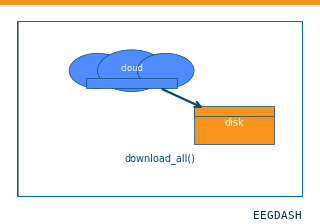 Download a dataset locallyPrefetch BIDS files to a local cache and validate the layout.
Download a dataset locallyPrefetch BIDS files to a local cache and validate the layout.Swap any load_dataset(...) call for ds004841 to reproduce the tutorial on this dataset.
Citation
Gabriella Larkin, James A. Davis, Victor Paul, Marcel Cannon, Chris Manteuffel, … (n.d.). TX14. 10.18112/openneuro.ds004841.v1.0.1
Provenance
¹Contributed to openneuro in BIDS format.
²Curated & ingested by the EEGDash catalog; see CITATION.cff for canonical reference.
³Persistent identifier: 10.18112/openneuro.ds004841.v1.0.1.
See Also#
eegdash.dataset.EEGDashDataseteegdash.dataset