
DS004264: eeg dataset, 21 subjects#
Steer the Ship
Access recordings and metadata through EEGDash.
Citation: Cameron D. Hassall, Yan Yan, Laurence T. Hunt (—). Steer the Ship. 10.18112/openneuro.ds004264.v1.1.0
Modality: eeg Subjects: 21 Recordings: 21 License: CC0 Source: openneuro Citations: 0.0
Metadata: Complete (100%)
21-participant EEG dataset — Steer the Ship.
Quickstart#
Install
pip install eegdash
Access the data
from eegdash.dataset import DS004264
dataset = DS004264(cache_dir="./data")
# Get the raw object of the first recording
raw = dataset.datasets[0].raw
print(raw.info)
Filter by subject
dataset = DS004264(cache_dir="./data", subject="01")
Advanced query
dataset = DS004264(
cache_dir="./data",
query={"subject": {"$in": ["01", "02"]}},
)
Iterate recordings
for rec in dataset:
print(rec.subject, rec.raw.info['sfreq'])
If you use this dataset in your research, please cite the original authors.
BibTeX
@dataset{ds004264,
title = {Steer the Ship},
author = {Cameron D. Hassall and Yan Yan and Laurence T. Hunt},
doi = {10.18112/openneuro.ds004264.v1.1.0},
url = {https://doi.org/10.18112/openneuro.ds004264.v1.1.0},
}
About This Dataset#
Twenty-one participants learned to control the trajectory of a ship, represented by centrally presented rotating arrow. Prior to each round participants were cued about the degree of controller and environmental noise (“wind”) they would experience. During the round, participants pressed the ‘f’ and ‘j’ keys to apply angular force in either a clockwise or counterclockwise direction. The goal of the task was to keep the ship closely oriented towards a target. Points were accumulated depending on the mean distance to target. The ship would crash if it strayed too far from the target (and the round would end). Each round lasted up to 1 minute. The underlying physics were based on the pole-and-cart problem (i.e., unstable).
There were four noise conditions:
1: No noise 2: Environmental noise only (ship occasionally moved on its own) 3: Controller noise only (amount of force varied) 4: Environmental and controller noise Participant 12 should be excluded from event-locked analyses due to bad triggers (trigger cable was partially disconnected).
Steer the Ship
Also note that the RT for the first button press in each round is not recorded (but is recorded in the participantActions column). Trigger Modifiers (added to condition numbers) Add 0: Condition cue Add 10: Start of round Add 20: Left button press Add 30: Right button press Add 40: Left button press (computer) Add 50: Right button press (computer) Add 60: Crash Add 70: Success (reached 1 minute of play) Add 80: Points displayed
Cohort#
Dataset Statistics#
Age distribution by gender (n=21, range 21–41 yr, mean 25.8 yr)
Sex composition
Channel counts: 31 ch (n=21 recordings)
Sampling frequencies: 1000.0 Hz (n=21 recordings)
Total recording duration: 7 h 27 min
Signal · Electrodes & live trace#
Live trace viewer — sub-13 · task-steertheship
Showing one representative recording out of
21 subjects and 21 recordings in this dataset.
Browse the full set on OpenNeuro;
drop any other _eeg.{set,edf,bdf,vhdr} file onto the
viewer (or pass ?eeg=<url>) to inspect it.
Electrode layout — EEG · 31 sensors — 31 channels
NEMAR Processing Statistics#
The plots below are generated by NEMAR’s automated EEG pipeline. The histogram shows pipeline success for data cleaning and ICA decomposition, the percentage of data frames and EEG channels retained after artefact removal, line noise per channel (RMS, dB), and the age/gender distribution of participants.

HED event descriptors word cloud

Manifest#
File Explorer#
Browse the BIDS file structure of this dataset. Records are fetched on demand from the EEGDash catalog the first time you open the explorer.
Full dataset metadata table
Dataset ID |
|
Title |
Steer the Ship |
Author (year) |
|
Canonical |
— |
Importable as |
|
Year |
— |
Authors |
Cameron D. Hassall, Yan Yan, Laurence T. Hunt |
License |
CC0 |
Citation / DOI |
|
Source links |
OpenNeuro | NeMAR | Source URL |
Copy-paste BibTeX
@dataset{ds004264,
title = {Steer the Ship},
author = {Cameron D. Hassall and Yan Yan and Laurence T. Hunt},
doi = {10.18112/openneuro.ds004264.v1.1.0},
url = {https://doi.org/10.18112/openneuro.ds004264.v1.1.0},
}
API Reference#
eegdash.datasetEEGDashDatasetDS004264 · Hassall2022_Steereegdash/dataset/registry.py · [source ↗]- class eegdash.dataset.DS004264(cache_dir: str, query: dict | None = None, s3_bucket: str | None = None, **kwargs)[source]#
Steer the Ship
- Study:
ds004264(OpenNeuro)- Author (year):
Hassall2022_Steer- Canonical:
—
Also importable as:
DS004264,Hassall2022_Steer.Modality:
eeg; Experiment type:Learning; Subject type:Healthy. Subjects: 21; recordings: 21; tasks: 1.- Parameters:
cache_dir (str | Path) – Directory where data are cached locally.
query (dict | None) – Additional MongoDB-style filters to AND with the dataset selection. Must not contain the key
dataset.s3_bucket (str | None) – Base S3 bucket used to locate the data.
**kwargs (dict) – Additional keyword arguments forwarded to
EEGDashDataset.
- data_dir#
Local dataset cache directory (
cache_dir / dataset_id).- Type:
Path
Notes
Each item is a recording; recording-level metadata are available via
dataset.description.querysupports MongoDB-style filters on fields inALLOWED_QUERY_FIELDSand is combined with the dataset filter. Dataset-specific caveats are not provided in the summary metadata.References
OpenNeuro dataset: https://openneuro.org/datasets/ds004264 NeMAR dataset: https://nemar.org/dataexplorer/detail?dataset_id=ds004264 DOI: https://doi.org/10.18112/openneuro.ds004264.v1.1.0 NEMAR citation count: 0
Examples
>>> from eegdash.dataset import DS004264 >>> dataset = DS004264(cache_dir="./data") >>> recording = dataset[0] >>> raw = recording.load()
- __init__(cache_dir: str, query: dict | None = None, s3_bucket: str | None = None, **kwargs)[source]#
- save(path: str, overwrite: bool = False, offset: int = 0)[source]#
Save datasets to files by creating one subdirectory for each dataset:
path/ 0/ 0-raw.fif | 0-epo.fif description.json raw_preproc_kwargs.json (if raws were preprocessed) window_kwargs.json (if this is a windowed dataset) window_preproc_kwargs.json (if windows were preprocessed) target_name.json (if target_name is not None and dataset is raw) 1/ 1-raw.fif | 1-epo.fif description.json raw_preproc_kwargs.json (if raws were preprocessed) window_kwargs.json (if this is a windowed dataset) window_preproc_kwargs.json (if windows were preprocessed) target_name.json (if target_name is not None and dataset is raw)
- Parameters:
path (str) –
- Directory in which subdirectories are created to store
-raw.fif | -epo.fif and .json files to.
overwrite (bool) – Whether to delete old subdirectories that will be saved to in this call.
offset (int) – If provided, the integer is added to the id of the dataset in the concat. This is useful in the setting of very large datasets, where one dataset has to be processed and saved at a time to account for its original position.
BaseDataset from braindecode — windowed via create_windows_from_events.braindecodeDataLoader; supports parallel workers and on-the-fly augmentations.pytorchdatasets.load_dataset("EEGDash/ds004264").huggingface Find datasets with the EEGDash APIQuery the catalogue, filter by task or modality, list candidates.
Find datasets with the EEGDash APIQuery the catalogue, filter by task or modality, list candidates. Load one EEG recordingResolve a single record to an MNE Raw with channels and events.
Load one EEG recordingResolve a single record to an MNE Raw with channels and events. EEG recording to PyTorch DataLoaderWrap braindecode windows in a DataLoader for model training.
EEG recording to PyTorch DataLoaderWrap braindecode windows in a DataLoader for model training. Preprocess EEG and create windowsFilter, resample, epoch — and persist the windowed dataset.
Preprocess EEG and create windowsFilter, resample, epoch — and persist the windowed dataset.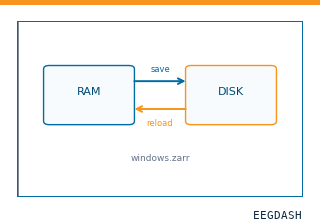 Save and reload prepared dataCache a windowed dataset to disk and reattach it without recompute.
Save and reload prepared dataCache a windowed dataset to disk and reattach it without recompute.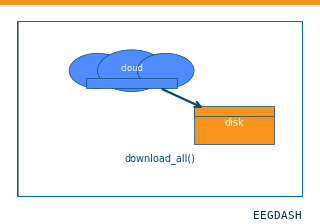 Download a dataset locallyPrefetch BIDS files to a local cache and validate the layout.
Download a dataset locallyPrefetch BIDS files to a local cache and validate the layout.Swap any load_dataset(...) call for ds004264 to reproduce the tutorial on this dataset.
Citation
Cameron D. Hassall, Yan Yan, Laurence T. Hunt (n.d.). Steer the Ship. 10.18112/openneuro.ds004264.v1.1.0
Provenance
¹Contributed to openneuro in BIDS format.
²Curated & ingested by the EEGDash catalog; see CITATION.cff for canonical reference.
³Persistent identifier: 10.18112/openneuro.ds004264.v1.1.0.
See Also#
eegdash.dataset.EEGDashDataseteegdash.dataset