
DS004460: eeg dataset, 20 subjects#
EEG and motion capture data set for a full-body/joystick rotation task
Access recordings and metadata through EEGDash.
Citation: Gramann, K., Hohlefeld, F.U., Gehrke, L., Klug, M (2021). EEG and motion capture data set for a full-body/joystick rotation task. 10.18112/openneuro.ds004460.v1.1.0
Modality: eeg Subjects: 20 Recordings: 40 License: CC0 Source: openneuro Citations: 1.0
Metadata: Complete (100%)
20-participant EEG dataset — EEG and motion capture data set for a full-body/joystick rotation task.
Quickstart#
Install
pip install eegdash
Access the data
from eegdash.dataset import DS004460
dataset = DS004460(cache_dir="./data")
# Get the raw object of the first recording
raw = dataset.datasets[0].raw
print(raw.info)
Filter by subject
dataset = DS004460(cache_dir="./data", subject="01")
Advanced query
dataset = DS004460(
cache_dir="./data",
query={"subject": {"$in": ["01", "02"]}},
)
Iterate recordings
for rec in dataset:
print(rec.subject, rec.raw.info['sfreq'])
If you use this dataset in your research, please cite the original authors.
BibTeX
@dataset{ds004460,
title = {EEG and motion capture data set for a full-body/joystick rotation task},
author = {Gramann, K. and Hohlefeld, F.U. and Gehrke, L. and Klug, M},
doi = {10.18112/openneuro.ds004460.v1.1.0},
url = {https://doi.org/10.18112/openneuro.ds004460.v1.1.0},
}
About This Dataset#
An EEG + motion capture data set, analyzed and published in “Gramann, K., Hohlefeld, F. U., Gehrke, L., & Klug, M. (2021). Human cortical dynamics during full-body heading changes. Scientific Reports, 11(1), 18186”.
Used as a BIDS-example data set for EEG + motion : bids-standard/bids-examples
Overview
This is the “Spot rotation” dataset.
It contains EEG and motion data collected from 20 subjects collected at the Berlin Mobile Brain-Body Imaging Lab, while they rotated their heading in physical space or on flat screen using a joystick.
Detailed description of the paradigm can be found in the following reference:
View full README
Overview
This is the “Spot rotation” dataset.
It contains EEG and motion data collected from 20 subjects collected at the Berlin Mobile Brain-Body Imaging Lab, while they rotated their heading in physical space or on flat screen using a joystick.
Detailed description of the paradigm can be found in the following reference:
Gramann.K, Hohlefeld, F. U., Gehrke, L., and Klug, M. “Human cortical dynamics during full-body heading changes”.
Scientific Reports 11, 18186 (2021). https://doi.org/10.1038/s41598-021-97749-8
Citing this dataset
Please cite as follows:
Gramann, K., Hohlefeld, F.U., Gehrke, L. et al. Human cortical dynamics during full-body heading changes. Sci Rep 11, 18186 (2021). https://doi.org/10.1038/s41598-021-97749-8
For more information, see the dataset_description.json file.
License
This motion_spotrotation dataset is made available under the Creative Commons CC0 license.
Information on CC0 can be found here : https://creativecommons.org/share-your-work/public-domain/cc0/
Format
The dataset is formatted according to the Brain Imaging Data Structure. See the
dataset_description.json file for the specific version used.
Generally, you can find data in the .tsv files and descriptions in the accompanying .json files.
An important BIDS definition to consider is the “Inheritance Principle”, which is described in the BIDS specification under the following link: https://bids-specification.rtfd.io/en/stable/02-common-principles.html#the-inheritance-principle The section states that:
Any metadata file (such as .json, .bvec or .tsv) may be defined at any directory level, but no more than one applicable file may be defined at a given level […] The values from the top level are inherited by all lower levels unless they are overridden by a file at the lower level.
Details about the experiment
For a detailed description of the task, see Gramann et al. (2021).
What follows is a brief summary. Data were collected from 20 healthy adults (11 females) with a mean age of 30.25 years (SD = 7.68, ranging from ages 20 to 46) who received 10€/h or course credit for compensation.
All participants reported normal or corrected to normal vision and no history of neurological disease. Eighteen participants reported being right-handed (two left-handed).
To control for the effects of different reference frame proclivities on neural dynamics, the online version of the spatial reference frame proclivity test (RFPT44, 45) was administered prior to the experiment.
Participants had to consistently use an ego- or allocentric reference frame in at least 80% of their responses.
Of the 20 participants, nine preferentially used an egocentric reference frame, nine used an allocentric reference frame, and two used a mixed strategy.
One participant (egocentric reference frame) dropped out of the experiment after the first block due to motion sickness and was removed from further data analyses.
The reported results are based on the remaining 19 participants. The experimental procedures were approved by the local ethics committee (Technische Universität Berlin, Germany) and the research was performed in accordance with the ethics guidelines.
The study was conducted in accordance to the Declaration of Helsinki and all participants signed a written informed consent.
Participants performed a spatial orientation task in a sparse virtual environment (WorldViz Vizard, Santa Barbara, USA) consisting of an infinite floor granulated in green and black.
The experiment was self-paced and participants advanced the experiment by starting and ending each trial with a button press using the index finger of the dominant hand. A trial started with the onset of a red pole, which participants had to face and align with.
Once the button was pressed the pole disappeared and was immediately replaced by a red sphere floating at eye level.
The sphere automatically started to move around the participant along a circular trajectory at a fixed distance (30 m) with one of two different velocity profiles.
Participants were asked to rotate on the spot and to follow the sphere, keeping it in the center of their visual field (outward rotation).
The sphere stopped unpredictably at varying eccentricity between 30° and 150° and turned blue, which indicated that participants had to rotate back to the initial heading (backward rotation).
When participants had reproduced their estimated initial heading, they confirmed their heading with a button press and the red pole reappeared for reorientation.
The participants completed the experimental task twice, using (i) a traditional desktop 2D setup (visual flow controlled through joystick movement; “joyR”), and (ii) equipped with a MoBI setup (visual flow controlled through active physical rotation with the whole body; “physR”).
The condition order was balanced across participants. To ensure the comparability of both rotation conditions, participants carried the full motion capture system at all times.
In the joyR condition participants stood in the dimly lit experimental hall in front of a standard TV monitor (1.5 m viewing distance, HD resolution, 60 Hz refresh rate, 40″ diagonal size) and were instructed to move as little as possible.
They followed the sphere by tilting the joystick and were thus only able to use visual flow information to complete the task.
In the physical rotation condition participants were situated in a 3D virtual reality environment using a head mounted display (HTC Vive; 2 × 1080 × 1200 resolution, 90 Hz refresh rate, 110° field of view).
Participants’ movements were unconstrained, i.e., in order to follow the sphere they physically rotated on the spot, thus enabling them to use motor and kinesthetic information (i.e., vestibular input and proprioception) in addition to the visual flow for completing the task.
If participants diverged from the center position as determined through motion capture of the head position, the task automatically halted and participants were asked to regain center position, indicated by a yellow floating sphere, before continuing with the task.
Each movement condition was preceded by recording a three-minute baseline, during which the participants were instructed to stand still and to look straight ahead.
Data Recordings: EEG. EEG data was recorded from 157 active electrodes with a sampling rate of 1000 Hz and band-pass filtered from 0.016 Hz to 500 Hz (BrainAmp Move System, Brain Products, Gilching, Germany).
Using an elastic cap with an equidistant design (EASYCAP, Herrsching, Germany), 129 electrodes were placed on the scalp, and 28 electrodes were placed around the neck using a custom neckband (EASYCAP, Herrsching, Germany) in order to record neck muscle activity.
Data were referenced to an electrode located closest to the standard position FCz. Impedances were kept below 10kΩ for standard locations on the scalp, and below 50kΩ for the neckband.
Electrode locations were digitized using an optical tracking system (Polaris Vicra, NDI, Waterloo, ON, Canada). Data Recordings: Motion Capture.
Two different motion capture data sources were used: 19 red active light-emitting diodes (LEDs) were captured using 31 cameras of the Impulse X2 System (PhaseSpace Inc., San Leandro, CA, USA) with a sampling rate of 90 Hz.
They were placed on the feet (2 x 4 LEDs), around the hips (5 LEDs), on the shoulders (4 LEDs), and on the HTC Vive (2 LEDs; to account for an offset in yaw angle between the PhaseSpace and the HTC Vive tracking).
Except for the two LEDs on the HTC Vive, they were subsequently grouped together to form rigid body parts of feet, hip, and shoulders, enabling tracking with six degrees of freedom (x, y, and z position and roll, yaw, and pitch orientation) per body part.
Head motion capture data (position and orientation) was acquired using the HTC Lighthouse tracking system with 90Hz sampling rate, since it was also used for the positional tracking of the virtual reality view.
The original data was recorded in .xdf format using labstreaminglayer
(sccn/labstreaminglayer). It is stored in the /sourcedata
directory. To comply with the BIDS format, the .xdf format was converted to
BrainVision format (see the .eeg file for binary eeg data, the .vhdr as a
text header filer containing meta data, and the .vmrk as a text file storing
the eeg markers).
Cohort#
Dataset Statistics#
Age distribution by gender (n=20, range 21–34 yr, mean 26.0 yr)
Sex composition
Channel counts: 160 ch (n=40 recordings)
Sampling frequencies: 1000.0 Hz (n=40 recordings)
Total recording duration: 27 h
Signal · Electrodes & live trace#
Live trace viewer — sub-13 · ses-joy · task-Rotation
Showing one representative recording out of
20 subjects and 40 recordings in this dataset.
Browse the full set on OpenNeuro;
drop any other _eeg.{set,edf,bdf,vhdr} file onto the
viewer (or pass ?eeg=<url>) to inspect it.
Electrode layout — EEG · 157 sensors — 157 channels
NEMAR Processing Statistics#
The plots below are generated by NEMAR’s automated EEG pipeline. The histogram shows pipeline success for data cleaning and ICA decomposition, the percentage of data frames and EEG channels retained after artefact removal, line noise per channel (RMS, dB), and the age/gender distribution of participants.

HED event descriptors word cloud

Manifest#
File Explorer#
Browse the BIDS file structure of this dataset. Records are fetched on demand from the EEGDash catalog the first time you open the explorer.
Full dataset metadata table
Dataset ID |
|
Title |
EEG and motion capture data set for a full-body/joystick rotation task |
Author (year) |
|
Canonical |
— |
Importable as |
|
Year |
2021 |
Authors |
Gramann, K., Hohlefeld, F.U., Gehrke, L., Klug, M |
License |
CC0 |
Citation / DOI |
|
Source links |
Copy-paste BibTeX
@dataset{ds004460,
title = {EEG and motion capture data set for a full-body/joystick rotation task},
author = {Gramann, K. and Hohlefeld, F.U. and Gehrke, L. and Klug, M},
doi = {10.18112/openneuro.ds004460.v1.1.0},
url = {https://doi.org/10.18112/openneuro.ds004460.v1.1.0},
}
API Reference#
eegdash.datasetEEGDashDatasetDS004460 · Gramann2023eegdash/dataset/registry.py · [source ↗]- class eegdash.dataset.DS004460(cache_dir: str, query: dict | None = None, s3_bucket: str | None = None, **kwargs)[source]#
EEG and motion capture data set for a full-body/joystick rotation task
- Study:
ds004460(OpenNeuro)- Author (year):
Gramann2023- Canonical:
—
Also importable as:
DS004460,Gramann2023.Modality:
eeg; Experiment type:Perception; Subject type:Healthy. Subjects: 20; recordings: 40; tasks: 1.- Parameters:
cache_dir (str | Path) – Directory where data are cached locally.
query (dict | None) – Additional MongoDB-style filters to AND with the dataset selection. Must not contain the key
dataset.s3_bucket (str | None) – Base S3 bucket used to locate the data.
**kwargs (dict) – Additional keyword arguments forwarded to
EEGDashDataset.
- data_dir#
Local dataset cache directory (
cache_dir / dataset_id).- Type:
Path
Notes
Each item is a recording; recording-level metadata are available via
dataset.description.querysupports MongoDB-style filters on fields inALLOWED_QUERY_FIELDSand is combined with the dataset filter. Dataset-specific caveats are not provided in the summary metadata.References
OpenNeuro dataset: https://openneuro.org/datasets/ds004460 NeMAR dataset: https://nemar.org/dataexplorer/detail?dataset_id=ds004460 DOI: https://doi.org/10.18112/openneuro.ds004460.v1.1.0 NEMAR citation count: 1
Examples
>>> from eegdash.dataset import DS004460 >>> dataset = DS004460(cache_dir="./data") >>> recording = dataset[0] >>> raw = recording.load()
- __init__(cache_dir: str, query: dict | None = None, s3_bucket: str | None = None, **kwargs)[source]#
- save(path: str, overwrite: bool = False, offset: int = 0)[source]#
Save datasets to files by creating one subdirectory for each dataset:
path/ 0/ 0-raw.fif | 0-epo.fif description.json raw_preproc_kwargs.json (if raws were preprocessed) window_kwargs.json (if this is a windowed dataset) window_preproc_kwargs.json (if windows were preprocessed) target_name.json (if target_name is not None and dataset is raw) 1/ 1-raw.fif | 1-epo.fif description.json raw_preproc_kwargs.json (if raws were preprocessed) window_kwargs.json (if this is a windowed dataset) window_preproc_kwargs.json (if windows were preprocessed) target_name.json (if target_name is not None and dataset is raw)
- Parameters:
path (str) –
- Directory in which subdirectories are created to store
-raw.fif | -epo.fif and .json files to.
overwrite (bool) – Whether to delete old subdirectories that will be saved to in this call.
offset (int) – If provided, the integer is added to the id of the dataset in the concat. This is useful in the setting of very large datasets, where one dataset has to be processed and saved at a time to account for its original position.
BaseDataset from braindecode — windowed via create_windows_from_events.braindecodeDataLoader; supports parallel workers and on-the-fly augmentations.pytorchdatasets.load_dataset("EEGDash/ds004460").huggingface Find datasets with the EEGDash APIQuery the catalogue, filter by task or modality, list candidates.
Find datasets with the EEGDash APIQuery the catalogue, filter by task or modality, list candidates. Load one EEG recordingResolve a single record to an MNE Raw with channels and events.
Load one EEG recordingResolve a single record to an MNE Raw with channels and events. EEG recording to PyTorch DataLoaderWrap braindecode windows in a DataLoader for model training.
EEG recording to PyTorch DataLoaderWrap braindecode windows in a DataLoader for model training. Preprocess EEG and create windowsFilter, resample, epoch — and persist the windowed dataset.
Preprocess EEG and create windowsFilter, resample, epoch — and persist the windowed dataset.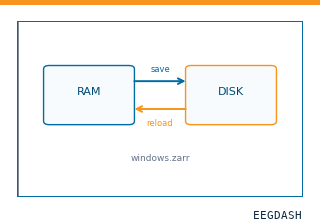 Save and reload prepared dataCache a windowed dataset to disk and reattach it without recompute.
Save and reload prepared dataCache a windowed dataset to disk and reattach it without recompute.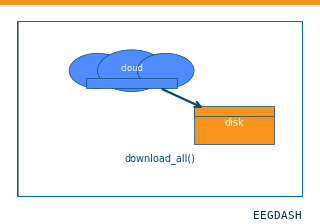 Download a dataset locallyPrefetch BIDS files to a local cache and validate the layout.
Download a dataset locallyPrefetch BIDS files to a local cache and validate the layout.Swap any load_dataset(...) call for ds004460 to reproduce the tutorial on this dataset.
Citation
Gramann, K., Hohlefeld, F.U., Gehrke, L., Klug, M (2021). EEG and motion capture data set for a full-body/joystick rotation task. 10.18112/openneuro.ds004460.v1.1.0
Provenance
¹Contributed to openneuro in BIDS format.
²Curated & ingested by the EEGDash catalog; see CITATION.cff for canonical reference.
³Persistent identifier: 10.18112/openneuro.ds004460.v1.1.0.
See Also#
eegdash.dataset.EEGDashDataseteegdash.dataset