
NM000249: eeg dataset, 13 subjects#
BNCI 2022-001 EEG Correlates of Difficulty Level dataset
Access recordings and metadata through EEGDash.
Citation: Ping-Keng Jao, Ricardo Chavarriaga, Jose del R. Millan (2021). BNCI 2022-001 EEG Correlates of Difficulty Level dataset.
Modality: eeg Subjects: 13 Recordings: 13 License: CC-BY-4.0 Source: nemar
Metadata: Complete (90%)
13-participant EEG dataset — BNCI 2022-001 EEG Correlates of Difficulty Level dataset.
Quickstart#
Install
pip install eegdash
Access the data
from eegdash.dataset import NM000249
dataset = NM000249(cache_dir="./data")
# Get the raw object of the first recording
raw = dataset.datasets[0].raw
print(raw.info)
Filter by subject
dataset = NM000249(cache_dir="./data", subject="01")
Advanced query
dataset = NM000249(
cache_dir="./data",
query={"subject": {"$in": ["01", "02"]}},
)
Iterate recordings
for rec in dataset:
print(rec.subject, rec.raw.info['sfreq'])
If you use this dataset in your research, please cite the original authors.
BibTeX
@dataset{nm000249,
title = {BNCI 2022-001 EEG Correlates of Difficulty Level dataset},
author = {Ping-Keng Jao and Ricardo Chavarriaga and Jose del R. Millan},
}
About This Dataset#
BNCI 2022-001 EEG Correlates of Difficulty Level dataset.
Schema: HED 8.4.0 | Browse: https://www.hedtags.org/hed-schema-browser
BNCI 2022-001 EEG Correlates of Difficulty Level dataset
trajectory_start
├─ Experiment-structure
└─ Label/trajectory_start
View full README
BNCI 2022-001 EEG Correlates of Difficulty Level dataset
trajectory_start
├─ Experiment-structure
└─ Label/trajectory_start
waypoint_miss
├─ Experiment-structure
└─ Label/waypoint_miss
waypoint_hit
├─ Experiment-structure
└─ Label/waypoint_hit
trajectory_end
├─ Experiment-structure
└─ Label/trajectory_end
Paradigm-Specific Parameters
Detected paradigm: motor_imagery
Imagery tasks: right_hand, left_hand, feet
Data Structure
Trials: {‘offline_session’: ‘32 trajectories of 32 waypoints each (~90 seconds per trajectory)’, ‘online_session_per_condition’: ‘12 trajectories of 33 waypoints each with 8 decision points’}
Blocks per session: 2
Trials context: Offline session: v-shape difficulty design (level 16→1→16). Online sessions: each condition had 12 trajectories, starting at level 1 for 1st trajectory, then 4 levels lower than final level of previous trajectory. Average 10.3 seconds per decision group (4 waypoints).
Preprocessing
Data state: preprocessed
Preprocessing applied: True
Steps: downsampling from 2048 Hz to 256 Hz, casual bandpass filtering between 1 and 40 Hz, SPHARA 20th order spatial low-pass filter for interpolation and artifact reduction, common-average re-referencing, ICA for EOG artifact removal, peripheral electrodes removed (25 central channels kept), artifact rejection: windows with peak value > 50 µV rejected
Highpass filter: 1.0 Hz
Lowpass filter: 40.0 Hz
Bandpass filter: [1.0, 40.0]
Filter type: Butterworth
Filter order: 14
Artifact methods: ICA, SPHARA, amplitude thresholding
Re-reference: car
Downsampled to: 256.0 Hz
Notes: Out of 39 recordings, P2 was removed twice from offline or online sessions due to short-circuit with the CMS or DRL electrode. On average, 15.8 ICA components were returned and 1.07 components were removed during construction of online decoders (correlation > 0.7 with EOG).
Signal Processing
Classifiers: LDA, Generalized Linear Model with elastic net regularization
Feature extraction: PSD, ICA, log-PSD
Frequency bands: analyzed=[2.0, 28.0] Hz; theta=[4.0, 8.0] Hz; alpha=[10.5, 13.0] Hz
Spatial filters: SPHARA, common-average reference
Cross-Validation
Method: leave-one-pair-out cross-validation (4x or 64x depending on class balance)
Folds: 4
Evaluation type: within_subject, cross_session
Performance (Original Study)
Accuracy: 76.7%
Offline Validation Accuracy Mean: 76.7
Offline Validation Accuracy Std: 5.1
Online Session 2 Accuracy Mean: 56.2
Online Session 2 Accuracy Std: 8.6
Online Session 3 Accuracy Mean: 54.7
Online Session 3 Accuracy Std: 11.0
Online Above Chance Recordings: 16 out of 26 (~62%)
BCI Application
Applications: drone control, adaptive learning, difficulty regulation, visuomotor learning
Environment: indoor laboratory
Online feedback: True
Tags
Pathology: Healthy
Modality: EEG
Type: Experimental/Research
Documentation
DOI: 10.1109/TAFFC.2021.3059688
Associated paper DOI: 10.1109/THMS.2020.3038339
License: CC-BY-4.0
Investigators: Ping-Keng Jao, Ricardo Chavarriaga, Jose del R. Millan
Senior author: Jose del R. Millan
Contact: ping-keng.jao@alumni.epfl.ch; ricardo.chavarriaga@zhaw.ch; jose.millan@austin.utexas.edu
Institution: Ecole Polytechnique Federale de Lausanne
Address: 1015 Geneva, Switzerland
Country: Switzerland
Repository: BNCI Horizon
Publication year: 2021
Funding: Swiss National Centres of Competence in Research (NCCR) Robotics
Acknowledgements: The authors would like to thank Alexander Cherpillod for his help in the implementation of the simulator and Ruslan Aydarkhanov for his suggestions in designing the protocol. Some figures were drawn with the Gramm MATLAB toolbox.
Keywords: EEG, real-time decoding of difficulty, closed-loop adaptation, (simulated) flying, workload, challenge point, brain-machine interface
Abstract
Adaptively increasing the difficulty level in learning was shown to be beneficial than increasing the level after some fixed time intervals. To efficiently adapt the level, we aimed at decoding the subjective difficulty level based on Electroencephalography (EEG) signals. We designed a visuomotor learning task that one needed to pilot a simulated drone through a series of waypoints of different sizes, to investigate the effectiveness of the EEG decoder. The EEG decoder was compared with another condition that the subjects decided when to increase the difficulty level. We examined the decoding performance together with behavioral outcomes. The online accuracies were higher than the chance level for 16 out of 26 cases, and the behavioral results, such as task scores, skill curves, and learning patterns, of EEG condition were similar to the condition based on manual regulation of difficulty.
Methodology
The study compared two conditions for difficulty regulation during a simulated drone piloting task: (1) EEG-based automatic difficulty adjustment using real-time decoding of perceived difficulty, and (2) Manual self-paced adjustment where subjects pressed a button when they found the level easy. Each subject participated in one offline session (for building subject-specific decoders) and two online sessions (each containing both EEG and Manual conditions in counterbalanced order). The task involved piloting a drone through circular waypoints with 16 difficulty levels defined by waypoint radius. Features were extracted using Thomson’s multitaper algorithm with 2-second sliding windows, and classification used generalized linear models with elastic net regularization followed by LDA. The study evaluated both decoding accuracy and behavioral outcomes (task scores, skill curves, learning patterns).
References
Jao, P.-K., Chavarriaga, R., & Millan, J. d. R. (2021). EEG Correlates of Difficulty Levels in Dynamical Transitions of Simulated Flying and Mapping Tasks. IEEE Transactions on Human-Machine Systems, 51(2), 99-108. https://doi.org/10.1109/THMS.2020.3038339 Notes .. versionadded:: 1.3.0 This dataset is designed for cognitive workload assessment and difficulty level detection. Unlike motor imagery datasets, the task involves actual motor control while the cognitive state (perceived difficulty) varies.
The public release contains only the first session (offline) data. Additional behavioral data and online sessions with closed-loop difficulty adaptation are not included. The paradigm “imagery” is used for compatibility, though the actual task involves motor execution with cognitive load variations. See Also BNCI2015_004 : Multi-class mental task dataset with imagery and cognitive tasks BNCI2014_001 : 4-class motor imagery dataset Examples
>> from moabb.datasets import BNCI2022_001 >>> dataset = BNCI2022_001() >>> dataset.subject_list [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13]
Appelhoff, S., Sanderson, M., Brooks, T., Vliet, M., Quentin, R., Holdgraf, C., Chaumon, M., Mikulan, E., Tavabi, K., Hochenberger, R., Welke, D., Brunner, C., Rockhill, A., Larson, E., Gramfort, A. and Jas, M. (2019). MNE-BIDS: Organizing electrophysiological data into the BIDS format and facilitating their analysis. Journal of Open Source Software 4: (1896). https://doi.org/10.21105/joss.01896 Pernet, C. R., Appelhoff, S., Gorgolewski, K. J., Flandin, G., Phillips, C., Delorme, A., Oostenveld, R. (2019). EEG-BIDS, an extension to the brain imaging data structure for electroencephalography. Scientific Data, 6, 103. https://doi.org/10.1038/s41597-019-0104-8 Generated by MOABB 1.5.0 (Mother of All BCI Benchmarks) NeuroTechX/moabb
NEMAR Metadata#
# BNCI 2022-001 EEG Correlates of Difficulty Level dataset BNCI 2022-001 EEG Correlates of Difficulty Level dataset. ## Dataset Overview - Code: BNCI2022-001 - Paradigm: imagery - DOI: 10.1109/THMS.2020.3038339 - Subjects: 13 - Sessions per subject: 1 - Events: trajectory_start=1, waypoint_miss=16, waypoint_hit=48, trajectory_end=255 - Trial interval: [0, 90] s - Session IDs: offline, online_session_2, online_session_3 - File format: gdf - Data preprocessed: True ## Acquisition - Sampling rate: 256.0 Hz - Number of channels: 64 - Channel types: eeg=64, eog=3 - Channel names: AF3, AF4, AF7, AF8, AFz, C1, C2, C3, C4, C5, C6, CP1, CP2, CP3, CP4, CP5, CP6, CPz, Cz, EOG1, EOG2, EOG3, F1, F2, F3, F4, F5, F6, F7, F8, FC1, FC2, FC3, FC4, FC5, FC6, FCz, FT7, FT8, Fp1, Fp2, Fpz, Fz, Iz, O1, O2, Oz, P1, P10, P2, P3, P4, P5, P6, P7, P8, P9, PO3, PO4, PO7, PO8, POz, Pz, T7, T8, TP7, TP8 - Montage: 10-10 - Hardware: Biosemi ActiveTwo - Software: EEGLAB - Reference: car - Sensor type: active - Line frequency: 50.0 Hz - Auxiliary channels: EOG (3 ch, horizontal, vertical), ppg ## Participants - Number of subjects: 13 - Health status: patients - Clinical population: normal or corrected-to-normal vision, no history of motor or neurological disease (one subject with history of vasovagal syncope) - Age: mean=22.6, std=1.04 - Gender distribution: female=8, male=5 - Handedness: {‘right’: 12, ‘left’: 1} ## Experimental Protocol - Paradigm: imagery - Number of classes: 4 - Class labels: trajectory_start, waypoint_miss, waypoint_hit, trajectory_end - Trial duration: 90.0 s - Study design: Subjects piloted a simulated drone through circular waypoints using a flight joystick, controlling roll and pitch while the drone maintained constant velocity. In offline session: 32 trajectories each with constant difficulty level (v-shape design from level 16 to 1 and back to 16), each trajectory had 32 waypoints and lasted ~90 seconds. In online sessions: each condition consisted of 12 trajectories with 33 waypoints and 8 decision points per trajectory. - Feedback type: visual - Stimulus type: visual - Stimulus modalities: visual - Primary modality: visual - Synchronicity: cue-based - Mode: both - Instructions: Subjects piloted a simulated drone through a series of circular waypoints. Subjects controlled the roll and pitch while the drone had a constant velocity of 11.8 arbitrary units per second when flying straight. They were instructed to press a button when the current level was easy as a way to collect ground truth for decoding or to proceed with self-paced learning. - Stimulus presentation: screen_size=twenty-inch screen, screen_resolution=1680x1050, input_device=Logitech Extreme 3D Pro joystick, waypoint_colors=green (current), blue (next), yellow (decision point), waypoint_distance_pitch=32 A.U. (at least 2.7 seconds), waypoint_distance_roll=24 A.U. (at least 2.0 seconds) ## HED Event Annotations Schema: HED 8.4.0 | Browse: https://www.hedtags.org/hed-schema-browser ```
- trajectory_start
├─ Experiment-structure └─ Label/trajectory_start
- waypoint_miss
├─ Experiment-structure └─ Label/waypoint_miss
- waypoint_hit
├─ Experiment-structure └─ Label/waypoint_hit
- trajectory_end
├─ Experiment-structure └─ Label/trajectory_end
``` ## Paradigm-Specific Parameters - Detected paradigm: motor_imagery - Imagery tasks: right_hand, left_hand, feet ## Data Structure - Trials: {‘offline_session’: ‘32 trajectories of 32 waypoints each (~90 seconds per trajectory)’, ‘online_session_per_condition’: ‘12 trajectories of 33 waypoints each with 8 decision points’} - Blocks per session: 2 - Trials context: Offline session: v-shape difficulty design (level 16→1→16). Online sessions: each condition had 12 trajectories, starting at level 1 for 1st trajectory, then 4 levels lower than final level of previous trajectory. Average 10.3 seconds per decision group (4 waypoints). ## Preprocessing - Data state: preprocessed - Preprocessing applied: True - Steps: downsampling from 2048 Hz to 256 Hz, casual bandpass filtering between 1 and 40 Hz, SPHARA 20th order spatial low-pass filter for interpolation and artifact reduction, common-average re-referencing, ICA for EOG artifact removal, peripheral electrodes removed (25 central channels kept), artifact rejection: windows with peak value > 50 µV rejected - Highpass filter: 1.0 Hz - Lowpass filter: 40.0 Hz - Bandpass filter: [1.0, 40.0] - Filter type: Butterworth - Filter order: 14 - Artifact methods: ICA, SPHARA, amplitude thresholding - Re-reference: car - Downsampled to: 256.0 Hz - Notes: Out of 39 recordings, P2 was removed twice from offline or online sessions due to short-circuit with the CMS or DRL electrode. On average, 15.8 ICA components were returned and 1.07 components were removed during construction of online decoders (correlation > 0.7 with EOG). ## Signal Processing - Classifiers: LDA, Generalized Linear Model with elastic net regularization - Feature extraction: PSD, ICA, log-PSD - Frequency bands: analyzed=[2.0, 28.0] Hz; theta=[4.0, 8.0] Hz; alpha=[10.5, 13.0] Hz - Spatial filters: SPHARA, common-average reference ## Cross-Validation - Method: leave-one-pair-out cross-validation (4x or 64x depending on class balance) - Folds: 4 - Evaluation type: within_subject, cross_session ## Performance (Original Study) - Accuracy: 76.7% - Offline Validation Accuracy Mean: 76.7 - Offline Validation Accuracy Std: 5.1 - Online Session 2 Accuracy Mean: 56.2 - Online Session 2 Accuracy Std: 8.6 - Online Session 3 Accuracy Mean: 54.7 - Online Session 3 Accuracy Std: 11.0 - Online Above Chance Recordings: 16 out of 26 (~62%) ## BCI Application - Applications: drone control, adaptive learning, difficulty regulation, visuomotor learning - Environment: indoor laboratory - Online feedback: True ## Tags - Pathology: Healthy - Modality: EEG - Type: Experimental/Research ## Documentation - DOI: 10.1109/TAFFC.2021.3059688 - Associated paper DOI: 10.1109/THMS.2020.3038339 - License: CC-BY-4.0 - Investigators: Ping-Keng Jao, Ricardo Chavarriaga, Jose del R. Millan - Senior author: Jose del R. Millan - Contact: ping-keng.jao@alumni.epfl.ch; ricardo.chavarriaga@zhaw.ch; jose.millan@austin.utexas.edu - Institution: Ecole Polytechnique Federale de Lausanne - Address: 1015 Geneva, Switzerland - Country: Switzerland - Repository: BNCI Horizon - Publication year: 2021 - Funding: Swiss National Centres of Competence in Research (NCCR) Robotics - Acknowledgements: The authors would like to thank Alexander Cherpillod for his help in the implementation of the simulator and Ruslan Aydarkhanov for his suggestions in designing the protocol. Some figures were drawn with the Gramm MATLAB toolbox. - Keywords: EEG, real-time decoding of difficulty, closed-loop adaptation, (simulated) flying, workload, challenge point, brain-machine interface ## Abstract Adaptively increasing the difficulty level in learning was shown to be beneficial than increasing the level after some fixed time intervals. To efficiently adapt the level, we aimed at decoding the subjective difficulty level based on Electroencephalography (EEG) signals. We designed a visuomotor learning task that one needed to pilot a simulated drone through a series of waypoints of different sizes, to investigate the effectiveness of the EEG decoder. The EEG decoder was compared with another condition that the subjects decided when to increase the difficulty level. We examined the decoding performance together with behavioral outcomes. The online accuracies were higher than the chance level for 16 out of 26 cases, and the behavioral results, such as task scores, skill curves, and learning patterns, of EEG condition were similar to the condition based on manual regulation of difficulty. ## Methodology The study compared two conditions for difficulty regulation during a simulated drone piloting task: (1) EEG-based automatic difficulty adjustment using real-time decoding of perceived difficulty, and (2) Manual self-paced adjustment where subjects pressed a button when they found the level easy. Each subject participated in one offline session (for building subject-specific decoders) and two online sessions (each containing both EEG and Manual conditions in counterbalanced order). The task involved piloting a drone through circular waypoints with 16 difficulty levels defined by waypoint radius. Features were extracted using Thomson’s multitaper algorithm with 2-second sliding windows, and classification used generalized linear models with elastic net regularization followed by LDA. The study evaluated both decoding accuracy and behavioral outcomes (task scores, skill curves, learning patterns). ## References Jao, P.-K., Chavarriaga, R., & Millan, J. d. R. (2021). EEG Correlates of Difficulty Levels in Dynamical Transitions of Simulated Flying and Mapping Tasks. IEEE Transactions on Human-Machine Systems, 51(2), 99-108. https://doi.org/10.1109/THMS.2020.3038339 Notes .. versionadded:: 1.3.0 This dataset is designed for cognitive workload assessment and difficulty level detection. Unlike motor imagery datasets, the task involves actual motor control while the cognitive state (perceived difficulty) varies. The public release contains only the first session (offline) data. Additional behavioral data and online sessions with closed-loop difficulty adaptation are not included. The paradigm “imagery” is used for compatibility, though the actual task involves motor execution with cognitive load variations. See Also BNCI2015_004 : Multi-class mental task dataset with imagery and cognitive tasks BNCI2014_001 : 4-class motor imagery dataset Examples >>> from moabb.datasets import BNCI2022_001 >>> dataset = BNCI2022_001() >>> dataset.subject_list [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13] Appelhoff, S., Sanderson, M., Brooks, T., Vliet, M., Quentin, R., Holdgraf, C., Chaumon, M., Mikulan, E., Tavabi, K., Hochenberger, R., Welke, D., Brunner, C., Rockhill, A., Larson, E., Gramfort, A. and Jas, M. (2019). MNE-BIDS: Organizing electrophysiological data into the BIDS format and facilitating their analysis. Journal of Open Source Software 4: (1896). https://doi.org/10.21105/joss.01896 Pernet, C. R., Appelhoff, S., Gorgolewski, K. J., Flandin, G., Phillips, C., Delorme, A., Oostenveld, R. (2019). EEG-BIDS, an extension to the brain imaging data structure for electroencephalography. Scientific Data, 6, 103. https://doi.org/10.1038/s41597-019-0104-8 — Generated by MOABB 1.5.0 (Mother of All BCI Benchmarks) NeuroTechX/moabb
License: CC-BY-4.0
Authors:
Ping-Keng Jao
Ricardo Chavarriaga
Jose del R. Millan
Cohort#
Dataset Statistics#
Age distribution by gender (n=13, range 23–23 yr, mean 22.0 yr)
Channel counts: 64 ch (n=13 recordings)
Sampling frequencies: 256.0 Hz (n=13 recordings)
Total recording duration: 16 h 11 min
Signal · Electrodes & live trace#
Live trace viewer — sub-13 · ses-0task · task-imagery · run-0
Showing one representative recording out of
13 subjects and 13 recordings in this dataset.
Browse the full set on OpenNeuro;
drop any other _eeg.{set,edf,bdf,vhdr} file onto the
viewer (or pass ?eeg=<url>) to inspect it.
Electrode layout — EEG · 64 sensors — 64 channels
NEMAR Processing Statistics#
The plots below are generated by NEMAR’s automated EEG pipeline. The histogram shows pipeline success for data cleaning and ICA decomposition, the percentage of data frames and EEG channels retained after artefact removal, line noise per channel (RMS, dB), and the age/gender distribution of participants.

HED event descriptors word cloud

Manifest#
File Explorer#
Browse the BIDS file structure of this dataset. Records are fetched on demand from the EEGDash catalog the first time you open the explorer.
Full dataset metadata table
API Reference#
eegdash.datasetEEGDashDatasetNM000249 · Jao2022eegdash/dataset/registry.py · [source ↗]- class eegdash.dataset.NM000249(cache_dir: str, query: dict | None = None, s3_bucket: str | None = None, **kwargs)[source]#
BNCI 2022-001 EEG Correlates of Difficulty Level dataset
- Study:
nm000249(NeMAR)- Author (year):
Jao2022- Canonical:
—
Also importable as:
NM000249,Jao2022.Modality:
eeg; Experiment type:Attention; Subject type:Healthy. Subjects: 13; recordings: 13; tasks: 1.- Parameters:
cache_dir (str | Path) – Directory where data are cached locally.
query (dict | None) – Additional MongoDB-style filters to AND with the dataset selection. Must not contain the key
dataset.s3_bucket (str | None) – Base S3 bucket used to locate the data.
**kwargs (dict) – Additional keyword arguments forwarded to
EEGDashDataset.
- data_dir#
Local dataset cache directory (
cache_dir / dataset_id).- Type:
Path
Notes
Each item is a recording; recording-level metadata are available via
dataset.description.querysupports MongoDB-style filters on fields inALLOWED_QUERY_FIELDSand is combined with the dataset filter. Dataset-specific caveats are not provided in the summary metadata.References
OpenNeuro dataset: https://openneuro.org/datasets/nm000249 NeMAR dataset: https://nemar.org/dataexplorer/detail?dataset_id=nm000249
Examples
>>> from eegdash.dataset import NM000249 >>> dataset = NM000249(cache_dir="./data") >>> recording = dataset[0] >>> raw = recording.load()
- __init__(cache_dir: str, query: dict | None = None, s3_bucket: str | None = None, **kwargs)[source]#
- save(path: str, overwrite: bool = False, offset: int = 0)[source]#
Save datasets to files by creating one subdirectory for each dataset:
path/ 0/ 0-raw.fif | 0-epo.fif description.json raw_preproc_kwargs.json (if raws were preprocessed) window_kwargs.json (if this is a windowed dataset) window_preproc_kwargs.json (if windows were preprocessed) target_name.json (if target_name is not None and dataset is raw) 1/ 1-raw.fif | 1-epo.fif description.json raw_preproc_kwargs.json (if raws were preprocessed) window_kwargs.json (if this is a windowed dataset) window_preproc_kwargs.json (if windows were preprocessed) target_name.json (if target_name is not None and dataset is raw)
- Parameters:
path (str) –
- Directory in which subdirectories are created to store
-raw.fif | -epo.fif and .json files to.
overwrite (bool) – Whether to delete old subdirectories that will be saved to in this call.
offset (int) – If provided, the integer is added to the id of the dataset in the concat. This is useful in the setting of very large datasets, where one dataset has to be processed and saved at a time to account for its original position.
BaseDataset from braindecode — windowed via create_windows_from_events.braindecodeDataLoader; supports parallel workers and on-the-fly augmentations.pytorchdatasets.load_dataset("EEGDash/nm000249").huggingface Find datasets with the EEGDash APIQuery the catalogue, filter by task or modality, list candidates.
Find datasets with the EEGDash APIQuery the catalogue, filter by task or modality, list candidates. Load one EEG recordingResolve a single record to an MNE Raw with channels and events.
Load one EEG recordingResolve a single record to an MNE Raw with channels and events. EEG recording to PyTorch DataLoaderWrap braindecode windows in a DataLoader for model training.
EEG recording to PyTorch DataLoaderWrap braindecode windows in a DataLoader for model training. Preprocess EEG and create windowsFilter, resample, epoch — and persist the windowed dataset.
Preprocess EEG and create windowsFilter, resample, epoch — and persist the windowed dataset.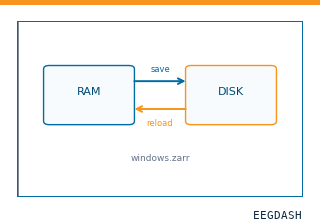 Save and reload prepared dataCache a windowed dataset to disk and reattach it without recompute.
Save and reload prepared dataCache a windowed dataset to disk and reattach it without recompute.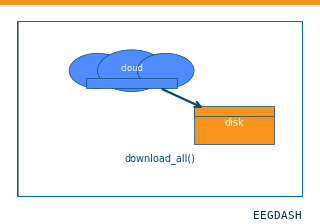 Download a dataset locallyPrefetch BIDS files to a local cache and validate the layout.
Download a dataset locallyPrefetch BIDS files to a local cache and validate the layout.Swap any load_dataset(...) call for nm000249 to reproduce the tutorial on this dataset.
Citation
Ping-Keng Jao, Ricardo Chavarriaga, Jose del R. Millan (2021). BNCI 2022-001 EEG Correlates of Difficulty Level dataset.
Provenance
¹Contributed to nemar in BIDS format.
²Curated & ingested by the EEGDash catalog; see CITATION.cff for canonical reference.
See Also#
eegdash.dataset.EEGDashDataseteegdash.dataset