
NM000151: eeg dataset, 12 subjects#
Motor imagery dataset for three imaginary states of the same upper extremity
Access recordings and metadata through EEGDash.
Citation: Mojgan Tavakolan, Zack Frehlick, Xinyi Yong, Carlo Menon (2019). Motor imagery dataset for three imaginary states of the same upper extremity. 10.82901/nemar.nm000151
Modality: eeg Subjects: 12 Recordings: 46 License: CC0-1.0 Source: nemar
Metadata: Complete (100%)
12-participant EEG dataset — Motor imagery dataset for three imaginary states of the same upper extremity.
Quickstart#
Install
pip install eegdash
Access the data
from eegdash.dataset import NM000151
dataset = NM000151(cache_dir="./data")
# Get the raw object of the first recording
raw = dataset.datasets[0].raw
print(raw.info)
Filter by subject
dataset = NM000151(cache_dir="./data", subject="01")
Advanced query
dataset = NM000151(
cache_dir="./data",
query={"subject": {"$in": ["01", "02"]}},
)
Iterate recordings
for rec in dataset:
print(rec.subject, rec.raw.info['sfreq'])
If you use this dataset in your research, please cite the original authors.
BibTeX
@dataset{nm000151,
title = {Motor imagery dataset for three imaginary states of the same upper extremity},
author = {Mojgan Tavakolan and Zack Frehlick and Xinyi Yong and Carlo Menon},
doi = {10.82901/nemar.nm000151},
url = {https://doi.org/10.82901/nemar.nm000151},
}
About This Dataset#
Motor imagery dataset for three imaginary states of the same upper extremity.
Schema: HED 8.4.0 | Browse: https://www.hedtags.org/hed-schema-browser
Motor imagery dataset for three imaginary states of the same upper extremity
rest
View full README
Motor imagery dataset for three imaginary states of the same upper extremity
rest
├─ Sensory-event
├─ Experimental-stimulus
├─ Visual-presentation
└─ Rest
right_hand
├─ Sensory-event, Experimental-stimulus, Visual-presentation
└─ Agent-action
└─ Imagine
├─ Move
└─ Right, Hand
right_elbow_flexion
├─ Sensory-event, Experimental-stimulus, Visual-presentation
└─ Agent-action
└─ Imagine
├─ Flex
└─ Right, Elbow
Paradigm-Specific Parameters
Detected paradigm: motor_imagery
Imagery tasks: rest, right_hand, right_elbow_flexion
Cue duration: 3.0 s
Imagery duration: 3.0 s
Data Structure
Trials: 2880
Trials per class: rest=20, right_hand=20, right_elbow_flexion=20
Trials context: 12 subjects x 4 sessions x 60 trials (20 per class)
Preprocessing
Data state: continuous
Signal Processing
Classifiers: SVM-RBF
Feature extraction: autoregressive_coefficients, waveform_length, root_mean_square
Frequency bands: bandpass=[6.0, 35.0] Hz
Cross-Validation
Method: 10x10-fold
Folds: 10
Evaluation type: within_subject
BCI Application
Applications: motor_control, rehabilitation
Environment: laboratory
Online feedback: False
Tags
Pathology: Healthy
Modality: Motor
Type: Research
Documentation
DOI: 10.1371/journal.pone.0174161
License: CC0-1.0
Investigators: Mojgan Tavakolan, Zack Frehlick, Xinyi Yong, Carlo Menon
Senior author: Carlo Menon
Institution: Simon Fraser University
Department: MENRVA Research Group, Schools of Mechatronic Systems Engineering and Engineering Science
Country: CA
Repository: Zenodo
Data URL: https://zenodo.org/records/18967205
Publication year: 2017
Ethics approval: Simon Fraser University Office of Research Ethics
Keywords: motor imagery, EEG, upper extremity, same limb, time-domain features, SVM, BCI
References
M. Tavakolan, Z. Frehlick, X. Yong, and C. Menon, “Classifying three imaginary states of the same upper extremity using time-domain features,” PLoS ONE, vol. 12, no. 3, e0174161, 2017. DOI: 10.1371/journal.pone.0174161 M. Tavakolan, Z. Frehlick, X. Yong, and C. Menon, “Data from: Classifying three imaginary states of the same upper extremity using time-domain features,” Dryad, 2017. DOI: 10.5061/dryad.6qs86 Appelhoff, S., Sanderson, M., Brooks, T., Vliet, M., Quentin, R., Holdgraf, C., Chaumon, M., Mikulan, E., Tavabi, K., Hochenberger, R., Welke, D., Brunner, C., Rockhill, A., Larson, E., Gramfort, A. and Jas, M. (2019). MNE-BIDS: Organizing electrophysiological data into the BIDS format and facilitating their analysis. Journal of Open Source Software 4: (1896). https://doi.org/10.21105/joss.01896 Pernet, C. R., Appelhoff, S., Gorgolewski, K. J., Flandin, G., Phillips, C., Delorme, A., Oostenveld, R. (2019). EEG-BIDS, an extension to the brain imaging data structure for electroencephalography. Scientific Data, 6, 103. https://doi.org/10.1038/s41597-019-0104-8 Generated by MOABB 1.5.0 (Mother of All BCI Benchmarks) NeuroTechX/moabb
NEMAR Metadata#
[](https://doi.org/10.82901/nemar.nm000151) # Motor imagery dataset for three imaginary states of the same upper extremity Motor imagery dataset for three imaginary states of the same upper extremity. ## Dataset Overview - Code: Tavakolan2017 - Paradigm: imagery - DOI: 10.1371/journal.pone.0174161 - Subjects: 12 - Sessions per subject: 4 - Events: rest=1, right_hand=2, right_elbow_flexion=3 - Trial interval: [0, 3] s - File format: BCI2000 ## Acquisition - Sampling rate: 1000.0 Hz - Number of channels: 32 - Channel types: eeg=32 - Montage: GSN-HydroCel-32 - Hardware: EGI Geodesic Net Amps 400 series - Reference: Cz - Sensor type: Ag/AgCl sponge - Line frequency: 60.0 Hz - Online filters: {‘bandpass’: [0.1, 100]} - Impedance threshold: 50 kOhm ## Participants - Number of subjects: 12 - Health status: healthy - Species: human ## Experimental Protocol - Paradigm: imagery - Number of classes: 3 - Class labels: rest, right_hand, right_elbow_flexion - Trial duration: 3.0 s - Study design: Three-class motor imagery of the same upper extremity: rest, grasping (MI-GRASP), and elbow flexion (MI-ELBOW). 20 trials per class per session, 4 sessions per subject. - Feedback type: none - Stimulus type: visual cue - Stimulus modalities: visual - Primary modality: visual - Synchronicity: synchronous - Mode: offline - Instructions: REST: relax without movement. MI-GRASP: imagine opening and closing all fingers to grab an object. MI-ELBOW: imagine moving the forearm up and down. ## HED Event Annotations Schema: HED 8.4.0 | Browse: https://www.hedtags.org/hed-schema-browser ```
- rest
├─ Sensory-event ├─ Experimental-stimulus ├─ Visual-presentation └─ Rest
- right_hand
├─ Sensory-event, Experimental-stimulus, Visual-presentation └─ Agent-action
- └─ Imagine
├─ Move └─ Right, Hand
- right_elbow_flexion
├─ Sensory-event, Experimental-stimulus, Visual-presentation └─ Agent-action
- └─ Imagine
├─ Flex └─ Right, Elbow
``` ## Paradigm-Specific Parameters - Detected paradigm: motor_imagery - Imagery tasks: rest, right_hand, right_elbow_flexion - Cue duration: 3.0 s - Imagery duration: 3.0 s ## Data Structure - Trials: 2880 - Trials per class: rest=20, right_hand=20, right_elbow_flexion=20 - Trials context: 12 subjects x 4 sessions x 60 trials (20 per class) ## Preprocessing - Data state: continuous ## Signal Processing - Classifiers: SVM-RBF - Feature extraction: autoregressive_coefficients, waveform_length, root_mean_square - Frequency bands: bandpass=[6.0, 35.0] Hz ## Cross-Validation - Method: 10x10-fold - Folds: 10 - Evaluation type: within_subject ## BCI Application - Applications: motor_control, rehabilitation - Environment: laboratory - Online feedback: False ## Tags - Pathology: Healthy - Modality: Motor - Type: Research ## Documentation - DOI: 10.1371/journal.pone.0174161 - License: CC0-1.0 - Investigators: Mojgan Tavakolan, Zack Frehlick, Xinyi Yong, Carlo Menon - Senior author: Carlo Menon - Institution: Simon Fraser University - Department: MENRVA Research Group, Schools of Mechatronic Systems Engineering and Engineering Science - Country: CA - Repository: Zenodo - Data URL: https://zenodo.org/records/18967205 - Publication year: 2017 - Ethics approval: Simon Fraser University Office of Research Ethics - Keywords: motor imagery, EEG, upper extremity, same limb, time-domain features, SVM, BCI ## References M. Tavakolan, Z. Frehlick, X. Yong, and C. Menon, “Classifying three imaginary states of the same upper extremity using time-domain features,” PLoS ONE, vol. 12, no. 3, e0174161, 2017. DOI: 10.1371/journal.pone.0174161 M. Tavakolan, Z. Frehlick, X. Yong, and C. Menon, “Data from: Classifying three imaginary states of the same upper extremity using time-domain features,” Dryad, 2017. DOI: 10.5061/dryad.6qs86 Appelhoff, S., Sanderson, M., Brooks, T., Vliet, M., Quentin, R., Holdgraf, C., Chaumon, M., Mikulan, E., Tavabi, K., Hochenberger, R., Welke, D., Brunner, C., Rockhill, A., Larson, E., Gramfort, A. and Jas, M. (2019). MNE-BIDS: Organizing electrophysiological data into the BIDS format and facilitating their analysis. Journal of Open Source Software 4: (1896). https://doi.org/10.21105/joss.01896 Pernet, C. R., Appelhoff, S., Gorgolewski, K. J., Flandin, G., Phillips, C., Delorme, A., Oostenveld, R. (2019). EEG-BIDS, an extension to the brain imaging data structure for electroencephalography. Scientific Data, 6, 103. https://doi.org/10.1038/s41597-019-0104-8 — Generated by MOABB 1.5.0 (Mother of All BCI Benchmarks) NeuroTechX/moabb
License: CC0-1.0
Authors:
Mojgan Tavakolan
Zack Frehlick
Xinyi Yong
Carlo Menon
Versions:
Version |
DOI |
Released |
|---|---|---|
|
Cohort#
Dataset Statistics#
Channel counts: 32 ch (n=46 recordings)
Sampling frequencies: 1000.0 Hz (n=46 recordings)
Total recording duration: 9 h 54 min
Signal · Electrodes & live trace#
Live trace viewer — sub-12 · ses-3 · task-imagery · run-0
Showing one representative recording out of
12 subjects and 46 recordings in this dataset.
Browse the full set on OpenNeuro;
drop any other _eeg.{set,edf,bdf,vhdr} file onto the
viewer (or pass ?eeg=<url>) to inspect it.
Electrode layout — EEG · 32 sensors — 32 channels
NEMAR Processing Statistics#
The plots below are generated by NEMAR’s automated EEG pipeline. The histogram shows pipeline success for data cleaning and ICA decomposition, the percentage of data frames and EEG channels retained after artefact removal, line noise per channel (RMS, dB), and the age/gender distribution of participants.

HED event descriptors word cloud

Manifest#
File Explorer#
Browse the BIDS file structure of this dataset. Records are fetched on demand from the EEGDash catalog the first time you open the explorer.
Full dataset metadata table
Dataset ID |
|
Title |
Motor imagery dataset for three imaginary states of the same upper extremity |
Author (year) |
|
Canonical |
— |
Importable as |
|
Year |
2019 |
Authors |
Mojgan Tavakolan, Zack Frehlick, Xinyi Yong, Carlo Menon |
License |
CC0-1.0 |
Citation / DOI |
|
Source links |
Copy-paste BibTeX
@dataset{nm000151,
title = {Motor imagery dataset for three imaginary states of the same upper extremity},
author = {Mojgan Tavakolan and Zack Frehlick and Xinyi Yong and Carlo Menon},
doi = {10.82901/nemar.nm000151},
url = {https://doi.org/10.82901/nemar.nm000151},
}
API Reference#
eegdash.datasetEEGDashDatasetNM000151 · Tavakolan2017eegdash/dataset/registry.py · [source ↗]- class eegdash.dataset.NM000151(cache_dir: str, query: dict | None = None, s3_bucket: str | None = None, **kwargs)[source]#
Motor imagery dataset for three imaginary states of the same upper extremity
- Study:
nm000151(NeMAR)- Author (year):
Tavakolan2017- Canonical:
—
Also importable as:
NM000151,Tavakolan2017.Modality:
eeg; Experiment type:Motor; Subject type:Healthy. Subjects: 12; recordings: 46; tasks: 1.- Parameters:
cache_dir (str | Path) – Directory where data are cached locally.
query (dict | None) – Additional MongoDB-style filters to AND with the dataset selection. Must not contain the key
dataset.s3_bucket (str | None) – Base S3 bucket used to locate the data.
**kwargs (dict) – Additional keyword arguments forwarded to
EEGDashDataset.
- data_dir#
Local dataset cache directory (
cache_dir / dataset_id).- Type:
Path
Notes
Each item is a recording; recording-level metadata are available via
dataset.description.querysupports MongoDB-style filters on fields inALLOWED_QUERY_FIELDSand is combined with the dataset filter. Dataset-specific caveats are not provided in the summary metadata.References
OpenNeuro dataset: https://openneuro.org/datasets/nm000151 NeMAR dataset: https://nemar.org/dataexplorer/detail?dataset_id=nm000151 DOI: https://doi.org/10.82901/nemar.nm000151
Examples
>>> from eegdash.dataset import NM000151 >>> dataset = NM000151(cache_dir="./data") >>> recording = dataset[0] >>> raw = recording.load()
- __init__(cache_dir: str, query: dict | None = None, s3_bucket: str | None = None, **kwargs)[source]#
- save(path: str, overwrite: bool = False, offset: int = 0)[source]#
Save datasets to files by creating one subdirectory for each dataset:
path/ 0/ 0-raw.fif | 0-epo.fif description.json raw_preproc_kwargs.json (if raws were preprocessed) window_kwargs.json (if this is a windowed dataset) window_preproc_kwargs.json (if windows were preprocessed) target_name.json (if target_name is not None and dataset is raw) 1/ 1-raw.fif | 1-epo.fif description.json raw_preproc_kwargs.json (if raws were preprocessed) window_kwargs.json (if this is a windowed dataset) window_preproc_kwargs.json (if windows were preprocessed) target_name.json (if target_name is not None and dataset is raw)
- Parameters:
path (str) –
- Directory in which subdirectories are created to store
-raw.fif | -epo.fif and .json files to.
overwrite (bool) – Whether to delete old subdirectories that will be saved to in this call.
offset (int) – If provided, the integer is added to the id of the dataset in the concat. This is useful in the setting of very large datasets, where one dataset has to be processed and saved at a time to account for its original position.
BaseDataset from braindecode — windowed via create_windows_from_events.braindecodeDataLoader; supports parallel workers and on-the-fly augmentations.pytorchdatasets.load_dataset("EEGDash/nm000151").huggingface Find datasets with the EEGDash APIQuery the catalogue, filter by task or modality, list candidates.
Find datasets with the EEGDash APIQuery the catalogue, filter by task or modality, list candidates. Load one EEG recordingResolve a single record to an MNE Raw with channels and events.
Load one EEG recordingResolve a single record to an MNE Raw with channels and events. EEG recording to PyTorch DataLoaderWrap braindecode windows in a DataLoader for model training.
EEG recording to PyTorch DataLoaderWrap braindecode windows in a DataLoader for model training. Preprocess EEG and create windowsFilter, resample, epoch — and persist the windowed dataset.
Preprocess EEG and create windowsFilter, resample, epoch — and persist the windowed dataset.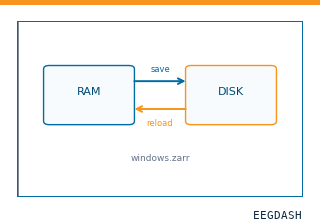 Save and reload prepared dataCache a windowed dataset to disk and reattach it without recompute.
Save and reload prepared dataCache a windowed dataset to disk and reattach it without recompute.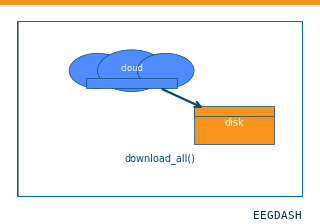 Download a dataset locallyPrefetch BIDS files to a local cache and validate the layout.
Download a dataset locallyPrefetch BIDS files to a local cache and validate the layout.Swap any load_dataset(...) call for nm000151 to reproduce the tutorial on this dataset.
Citation
Mojgan Tavakolan, Zack Frehlick, Xinyi Yong, Carlo Menon (2019). Motor imagery dataset for three imaginary states of the same upper extremity. 10.82901/nemar.nm000151
Provenance
¹Contributed to nemar in BIDS format.
²Curated & ingested by the EEGDash catalog; see CITATION.cff for canonical reference.
³Persistent identifier: 10.82901/nemar.nm000151.
See Also#
eegdash.dataset.EEGDashDataseteegdash.dataset