
NM000107: emg dataset, 100 subjects#
FRL Wrist Control: Wrist Movement Decoding from Surface Electromyography
Access recordings and metadata through EEGDash.
Citation: Patrick Kaifosh, Thomas R. Reardon, CTRL-labs at Reality Labs (2025). FRL Wrist Control: Wrist Movement Decoding from Surface Electromyography. 10.82901/nemar.nm000107
Modality: emg Subjects: 100 Recordings: 182 License: CC-BY-NC 4.0 Source: nemar
Metadata: Complete (100%)
100-participant EMG dataset — FRL Wrist Control: Wrist Movement Decoding from Surface Electromyography.
Quickstart#
Install
pip install eegdash
Access the data
from eegdash.dataset import NM000107
dataset = NM000107(cache_dir="./data")
# Get the raw object of the first recording
raw = dataset.datasets[0].raw
print(raw.info)
Filter by subject
dataset = NM000107(cache_dir="./data", subject="01")
Advanced query
dataset = NM000107(
cache_dir="./data",
query={"subject": {"$in": ["01", "02"]}},
)
Iterate recordings
for rec in dataset:
print(rec.subject, rec.raw.info['sfreq'])
If you use this dataset in your research, please cite the original authors.
BibTeX
@dataset{nm000107,
title = {FRL Wrist Control: Wrist Movement Decoding from Surface Electromyography},
author = {Patrick Kaifosh and Thomas R. Reardon and CTRL-labs at Reality Labs},
doi = {10.82901/nemar.nm000107},
url = {https://doi.org/10.82901/nemar.nm000107},
}
About This Dataset#
Dataset: wrist - Wrist posture and movement from wrist-based surface electromyography
Task: 1D continuous cursor control via wrist flexion/extension Participants: 100 subjects Sessions: 100 total (1 per subject) Publication: Kaifosh et al., 2025 - “A generic non-invasive neuromotor interface for human-computer interaction” (Nature)
This dataset captures wrist-based sEMG signals during wrist movements for continuous cursor control. Motion capture provides ground-truth wrist angles. The goal is to enable gesture-free control through wrist posture alone, demonstrating sEMG’s ability to decode motor intent before visible movement occurs.
wrist: Wrist Movement Control from EMG
Overview
Dataset Details
Participants
View full README
wrist: Wrist Movement Control from EMG
Overview
Dataset Details
Participants
Sample size: 100 participants
Demographics: Not available (marked as n/a)
Recording side: Dominant wrist
Sessions: 1 per participant
Hardware
Device: sEMG-RD (single wristband)
Channels: 16 (EMG0-EMG15)
Sampling rate: 2000 Hz
Reference: Bipolar differential
Ground truth: Motion capture wrist angles
Recording Protocol
Participant wears sEMG-RD on dominant wrist
Motion capture tracks wrist angles in real-time
Participant controls horizontal cursor position with wrist flexion/extension
Target acquisition task: Navigate to targets and hold for 500ms
Data Contents
Files per Session
sub-XXX/ses-XXX/emg/
├── sub-XXX_ses-XXX_task-wrist_emg.edf
├── sub-XXX_ses-XXX_task-wrist_emg.json
├── sub-XXX_ses-XXX_task-wrist_channels.tsv
├── sub-XXX_ses-XXX_task-wrist_events.tsv
└── sub-XXX_ses-XXX_electrodes.tsv
Events
Stage boundaries: Task phases and movement trials
Coordinate System
Single coordinate system at root (dominant wrist, percent units, no decimals)
Signal Processing
Note: This dataset has significant data quality issues: - Duplicate timestamps found in many sessions (up to 88% duplicates) - Irregular sampling requiring resampling (up to 916% deviation) - Post-processing: Duplicate removal followed by resampling to regular 2000 Hz
Baseline Performance
Published Results (Kaifosh et al., 2025)
Offline Evaluation: - Wrist angle velocity error: <13°/s - Error decreases with more training participants
Closed-loop Performance (n=17 naive test users): - Target acquisition time: Median 1.51s (sEMG decoder) - Dial-in time: Time to re-acquire after premature exit - Learning effects: Improvement from practice to evaluation blocks
Comparison: - Motion capture ground truth: 0.96s - MacBook trackpad: 0.68s - sEMG decoder: 1.51s (2.2× slower than trackpad)
Model architecture: MPF features + LSTM
Key Findings
Predictive signals: sEMG precedes movement by tens of milliseconds
Generic models work: Out-of-the-box cross-user generalization
Continuous control: Demonstrates feasibility of gesture-free interfaces
Room for improvement: Performance gap vs traditional inputs
Use Cases
Continuous control: Cursor/pointer movement
AR/VR navigation: Hands-free interface
Low-effort control: Minimal visible movement required
Predictive decoding: Intent detection before motion completion
Known Limitations
Single degree of freedom (1D control only)
Single wrist (dominant hand)
Duplicate timestamps (data quality issue)
Performance below traditional inputs
Extension to 2D control not demonstrated
Citation
Kaifosh, P., Reardon, T.R., & CTRL-labs at Reality Labs. (2025).
A generic non-invasive neuromotor interface for human-computer interaction.
Nature, 645(8081), 702-711. https://doi.org/10.1038/s41586-025-09255-w
Data Curator
Yahya Shirazi SCCN (Swartz Center for Computational Neuroscience) INC (Institute for Neural Computation) University of California San Diego
Version History
v1.0 (2025-10-01): Initial BIDS conversion
BIDS Version: 1.11 | EMG-BIDS: BEP-042 | Updated: Oct 1, 2025
NEMAR Metadata#
# wrist: Wrist Movement Control from EMG
## Overview
Dataset: wrist - Wrist posture and movement from wrist-based surface electromyography
Task: 1D continuous cursor control via wrist flexion/extension
Participants: 100 subjects
Sessions: 100 total (1 per subject)
Publication: Kaifosh et al., 2025 - “A generic non-invasive neuromotor interface for human-computer interaction” (Nature)
### Purpose
This dataset captures wrist-based sEMG signals during wrist movements for continuous cursor control. Motion capture provides ground-truth wrist angles. The goal is to enable gesture-free control through wrist posture alone, demonstrating sEMG’s ability to decode motor intent before visible movement occurs.
## Dataset Details
### Participants
- Sample size: 100 participants
- Demographics: Not available (marked as n/a)
- Recording side: Dominant wrist
- Sessions: 1 per participant
### Hardware
- Device: sEMG-RD (single wristband)
- Channels: 16 (EMG0-EMG15)
- Sampling rate: 2000 Hz
- Reference: Bipolar differential
- Ground truth: Motion capture wrist angles
### Recording Protocol
1. Participant wears sEMG-RD on dominant wrist
2. Motion capture tracks wrist angles in real-time
3. Participant controls horizontal cursor position with wrist flexion/extension
4. Target acquisition task: Navigate to targets and hold for 500ms
## Data Contents
### Files per Session
`
sub-XXX/ses-XXX/emg/
├── sub-XXX_ses-XXX_task-wrist_emg.edf
├── sub-XXX_ses-XXX_task-wrist_emg.json
├── sub-XXX_ses-XXX_task-wrist_channels.tsv
├── sub-XXX_ses-XXX_task-wrist_events.tsv
└── sub-XXX_ses-XXX_electrodes.tsv
`
### Events
- Stage boundaries: Task phases and movement trials
### Coordinate System
Single coordinate system at root (dominant wrist, percent units, no decimals)
## Signal Processing
Note: This dataset has significant data quality issues:
- Duplicate timestamps found in many sessions (up to 88% duplicates)
- Irregular sampling requiring resampling (up to 916% deviation)
- Post-processing: Duplicate removal followed by resampling to regular 2000 Hz
## Baseline Performance
### Published Results (Kaifosh et al., 2025)
Offline Evaluation:
- Wrist angle velocity error: <13°/s
- Error decreases with more training participants
Closed-loop Performance (n=17 naive test users):
- Target acquisition time: Median 1.51s (sEMG decoder)
- Dial-in time: Time to re-acquire after premature exit
- Learning effects: Improvement from practice to evaluation blocks
Comparison:
- Motion capture ground truth: 0.96s
- MacBook trackpad: 0.68s
- sEMG decoder: 1.51s (2.2× slower than trackpad)
Model architecture: MPF features + LSTM
## Key Findings
- Predictive signals: sEMG precedes movement by tens of milliseconds
- Generic models work: Out-of-the-box cross-user generalization
- Continuous control: Demonstrates feasibility of gesture-free interfaces
- Room for improvement: Performance gap vs traditional inputs
## Use Cases
- Continuous control: Cursor/pointer movement
- AR/VR navigation: Hands-free interface
- Low-effort control: Minimal visible movement required
- Predictive decoding: Intent detection before motion completion
## Known Limitations
- Single degree of freedom (1D control only)
- Single wrist (dominant hand)
- Duplicate timestamps (data quality issue)
- Performance below traditional inputs
- Extension to 2D control not demonstrated
## Citation
`
Kaifosh, P., Reardon, T.R., & CTRL-labs at Reality Labs. (2025).
A generic non-invasive neuromotor interface for human-computer interaction.
Nature, 645(8081), 702-711. https://doi.org/10.1038/s41586-025-09255-w
`
## Data Curator
Yahya Shirazi
SCCN (Swartz Center for Computational Neuroscience)
INC (Institute for Neural Computation)
University of California San Diego
## Version History
v1.0 (2025-10-01): Initial BIDS conversion
—
BIDS Version: 1.11 | EMG-BIDS: BEP-042 | Updated: Oct 1, 2025
License: CC-BY-NC 4.0
Authors:
Patrick Kaifosh
Thomas R. Reardon
CTRL-labs at Reality Labs
Versions:
Version |
DOI |
Released |
|---|---|---|
|
Cohort#
Dataset Statistics#
Channel counts: 16 ch (n=182 recordings)
Sampling frequencies: 2000.0 Hz (n=182 recordings)
Total recording duration: 77 h
Signal · Electrodes & live trace#
Live trace viewer — sub-021 · ses-001 · task-wrist
Showing one representative recording out of
100 subjects and 182 recordings in this dataset.
Browse the full set on OpenNeuro;
drop any other _emg.{set,edf,bdf,vhdr} file onto the
viewer (or pass ?emg=<url>) to inspect it.
Electrode layout — EMG · 16 sensors — 16 channels
NEMAR Processing Statistics#
The plots below are generated by NEMAR’s automated EEG pipeline. The histogram shows pipeline success for data cleaning and ICA decomposition, the percentage of data frames and EEG channels retained after artefact removal, line noise per channel (RMS, dB), and the age/gender distribution of participants.

HED event descriptors word cloud

Manifest#
File Explorer#
Browse the BIDS file structure of this dataset. Records are fetched on demand from the EEGDash catalog the first time you open the explorer.
Full dataset metadata table
Dataset ID |
|
Title |
FRL Wrist Control: Wrist Movement Decoding from Surface Electromyography |
Author (year) |
|
Canonical |
— |
Importable as |
|
Year |
2025 |
Authors |
Patrick Kaifosh, Thomas R. Reardon, CTRL-labs at Reality Labs |
License |
CC-BY-NC 4.0 |
Citation / DOI |
|
Source links |
Copy-paste BibTeX
@dataset{nm000107,
title = {FRL Wrist Control: Wrist Movement Decoding from Surface Electromyography},
author = {Patrick Kaifosh and Thomas R. Reardon and CTRL-labs at Reality Labs},
doi = {10.82901/nemar.nm000107},
url = {https://doi.org/10.82901/nemar.nm000107},
}
API Reference#
eegdash.datasetEEGDashDatasetNM000107 · Kaifosh2025_107eegdash/dataset/registry.py · [source ↗]- class eegdash.dataset.NM000107(cache_dir: str, query: dict | None = None, s3_bucket: str | None = None, **kwargs)[source]#
FRL Wrist Control: Wrist Movement Decoding from Surface Electromyography
- Study:
nm000107(NeMAR)- Author (year):
Kaifosh2025_107- Canonical:
—
Also importable as:
NM000107,Kaifosh2025_107.Modality:
emg; Subject type:Unknown. Subjects: 100; recordings: 182; tasks: 1.- Parameters:
cache_dir (str | Path) – Directory where data are cached locally.
query (dict | None) – Additional MongoDB-style filters to AND with the dataset selection. Must not contain the key
dataset.s3_bucket (str | None) – Base S3 bucket used to locate the data.
**kwargs (dict) – Additional keyword arguments forwarded to
EEGDashDataset.
- data_dir#
Local dataset cache directory (
cache_dir / dataset_id).- Type:
Path
Notes
Each item is a recording; recording-level metadata are available via
dataset.description.querysupports MongoDB-style filters on fields inALLOWED_QUERY_FIELDSand is combined with the dataset filter. Dataset-specific caveats are not provided in the summary metadata.References
OpenNeuro dataset: https://openneuro.org/datasets/nm000107 NeMAR dataset: https://nemar.org/dataexplorer/detail?dataset_id=nm000107 DOI: https://doi.org/10.82901/nemar.nm000107
Examples
>>> from eegdash.dataset import NM000107 >>> dataset = NM000107(cache_dir="./data") >>> recording = dataset[0] >>> raw = recording.load()
- __init__(cache_dir: str, query: dict | None = None, s3_bucket: str | None = None, **kwargs)[source]#
- save(path: str, overwrite: bool = False, offset: int = 0)[source]#
Save datasets to files by creating one subdirectory for each dataset:
path/ 0/ 0-raw.fif | 0-epo.fif description.json raw_preproc_kwargs.json (if raws were preprocessed) window_kwargs.json (if this is a windowed dataset) window_preproc_kwargs.json (if windows were preprocessed) target_name.json (if target_name is not None and dataset is raw) 1/ 1-raw.fif | 1-epo.fif description.json raw_preproc_kwargs.json (if raws were preprocessed) window_kwargs.json (if this is a windowed dataset) window_preproc_kwargs.json (if windows were preprocessed) target_name.json (if target_name is not None and dataset is raw)
- Parameters:
path (str) –
- Directory in which subdirectories are created to store
-raw.fif | -epo.fif and .json files to.
overwrite (bool) – Whether to delete old subdirectories that will be saved to in this call.
offset (int) – If provided, the integer is added to the id of the dataset in the concat. This is useful in the setting of very large datasets, where one dataset has to be processed and saved at a time to account for its original position.
BaseDataset from braindecode — windowed via create_windows_from_events.braindecodeDataLoader; supports parallel workers and on-the-fly augmentations.pytorchdatasets.load_dataset("EEGDash/nm000107").huggingface Find datasets with the EEGDash APIQuery the catalogue, filter by task or modality, list candidates.
Find datasets with the EEGDash APIQuery the catalogue, filter by task or modality, list candidates. Load one EEG recordingResolve a single record to an MNE Raw with channels and events.
Load one EEG recordingResolve a single record to an MNE Raw with channels and events. EEG recording to PyTorch DataLoaderWrap braindecode windows in a DataLoader for model training.
EEG recording to PyTorch DataLoaderWrap braindecode windows in a DataLoader for model training. Preprocess EEG and create windowsFilter, resample, epoch — and persist the windowed dataset.
Preprocess EEG and create windowsFilter, resample, epoch — and persist the windowed dataset.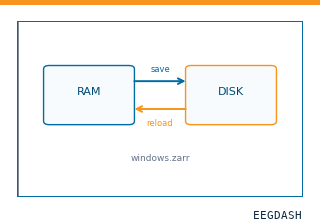 Save and reload prepared dataCache a windowed dataset to disk and reattach it without recompute.
Save and reload prepared dataCache a windowed dataset to disk and reattach it without recompute.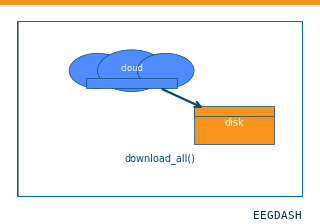 Download a dataset locallyPrefetch BIDS files to a local cache and validate the layout.
Download a dataset locallyPrefetch BIDS files to a local cache and validate the layout.Swap any load_dataset(...) call for nm000107 to reproduce the tutorial on this dataset.
Citation
Patrick Kaifosh, Thomas R. Reardon, CTRL-labs at Reality Labs (2025). FRL Wrist Control: Wrist Movement Decoding from Surface Electromyography. 10.82901/nemar.nm000107
Provenance
¹Contributed to nemar in BIDS format.
²Curated & ingested by the EEGDash catalog; see CITATION.cff for canonical reference.
³Persistent identifier: 10.82901/nemar.nm000107.
See Also#
eegdash.dataset.EEGDashDataseteegdash.dataset